产品展示
-
- Intel FPGA-Altera Agilex母板 Intel FPGA-Altera Stratix母板 Intel FPGA-Altera Arria母板 Intel FPGA-Altera Cyclone母板 Intel FPGA-Altera MAX母板 Intel FPGA-Altera 多媒体子板 Intel FPGA-Altera 界面转换子板 Intel FPGA-Altera 影像显示类子板 Intel FPGA-Altera 网路子板 Intel FPGA-Altera 类比/数位转换子板 Intel FPGA-Altera RF子板 Intel FPGA-Altera机器人套件 Intel FPGA-Altera USB Blaster Intel FPGA-Altera配件 FPGA|DSP|ARM|EDA|SOC教学实验箱 TI系列-C6000 DSP|ARM TI系列-C5000 DSP TI系列-C2000 DSP TI系列-DaVinci|Sitara TI系列-仿真器
推荐产品
- FPGA综合实验台 HC-STD-M
- 【DPO7254C】Tektonix泰克 高级信号分析示波器
- 【TMS320C6655/57】Tronlong创龙TL665xF-EasyEVM开发板
- HKMX-30型 十字路口交通信号灯实训装置
- 【SFP】TERASIC友晶SFP-HSM子板
- 【XAUI-SFP】DUAL XAUI TO SFP+ HSMC BOARD
- 【DK-DEV-1SGX-H-A】Intel Stratix 10 GX FPGA Development Kit
- 【TDS2024C】Tektonix泰克 200MHz示波器
- 【6221】Tektonix泰克 精密电流源
- 【DS1202Z-E】RIGOL普源 200MHz数字示波器

咨询热线:
18062095810
邮件: wangting@whhexin.com
电话:027-87538900
地址: 湖北·武汉·鲁巷·华乐商务中心1006
多水下机器人协作平台
- 产品型号: 多水下机器人协作平台
- 产品品牌: 乐智机器人
- 产品规格: 多智能体协作理论与实践研究
- 产品价格: 欢迎咨询采购,量多优惠多,提供完善的售后保障和支持!
- 咨询热线:18062095810
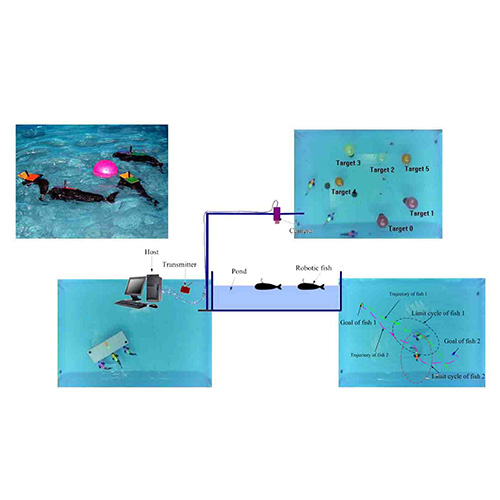
多水下机器人协作平台是多智能体协作理论与实践研究的教育平台。通过标准平台可以针对水下机器人进行全局信息/局部信息的路径规划、任务分配、队形控制、协作运输、围捕等群体协作任务的研究与实验,探索多机器人协作领域的理论问题。
1、图像系统
| 外形尺寸(长*宽*高) | 350*45*80mm |
| 电机 | Futaba舵机 |
| 控制器 | 72M高速处理STM32控制主板<1W(@5V DC) |
| 电池 | 大容量锂电池 |
| 充电时间 | 约60分钟 |
| 保护电路 | 专用定制锂电保护板 |
| 通讯方式 | 大功率KM级2.4G模块 |
| 编程方式 | 可无线编程 |
| 通讯频率 | 可软件自动选择 |
| 分辨率 | 752(H)X480(V) |
| 帧率 | 60fps |
| 功耗 | 额定<1W(@5V DC) |
| 镜头接口 | C |
| 光谱 | 黑白/彩色 |
| 机械尺寸 | 29X29X29mm,不含连接件 |
| 数据接口 | Mini USB2.0 |
| 水池布 | 防水布料,有高强绦纶经编双轴向PVC涂层材料 |
| 2*3m水池 | 满足国际水中机器人大赛比赛要求 |
| 金属支架 | 稳定固定摄像头,满足国际水中机器人大赛比赛要求 |
| 水球 | 橙色,可充气,满足国际水中机器人大赛比赛要求 |
| 框架 | 金属结构,满足国际水中机器人大赛比赛要求 |
| 发射功率 | 2W |
| 频道 | 自动对频 |
| 包括大平台与小平台 |
| 作为国际水中机器人大赛全觉视觉组比赛项目控制平台 |
| 可自主编写策略并加载到软件平台中进行多水下机器人协作控制 |
| 图像采集、图像识别、图像处理、图像显示以及参数设置功能 |
| 可根据现场环境的不同对图像处理的参数进行设置 |
| 高速处理CPU |
| 内含控制上位机 |
| 重量1.5kg,体积115mm*111mm*48.7mm,功率:19V,65w |